1.功能
平衡重式四支點叉車的后橋中心與車架是鉸軸連接,叉車后輪軸的中心和兩個前輪是支撐車體的3個支點,構成所謂的叉車重心穩定的三角形。在凹凸路面上,通過后輪軸的上下搖擺來吸引凹凸路面帶來的振動。但叉車在急速拐彎時會出現車輛傾斜,導致重心偏移,嚴重的會造成車輛側翻,特別是在貨叉高載重并處于高位時急轉彎,發生側翻的可能性很大。在叉車各類安全事故中,叉車傾翻造成事故約占42%。因此,提高叉車轉彎穩定性是減少這類事故的關鍵措施。后輪搖擺鎖定控制系統(Active control rear stabilizer)就是專為避免這類安全事故的解決方案,通過減小車輛急速拐彎時的傾斜度,使叉車轉彎時更穩定,更快速。
2.組成與原理
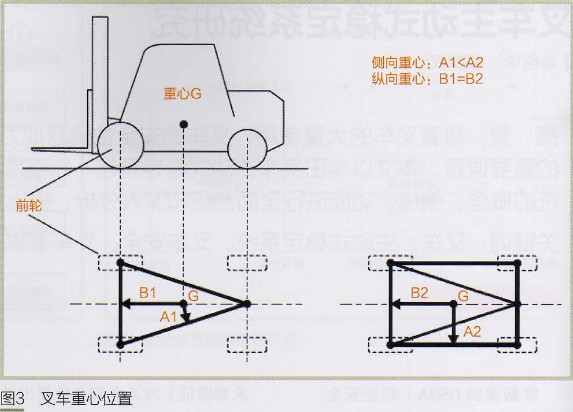
叉車行駛時要保持穩定,重心G必須落在圖3穩定三角形內,但在急速轉彎時車身傾斜,重心G即可能落在穩定三角形外,造成一側的車輪離地,車輛就可能發生傾翻。要避免這種情況發生,必須擴大穩定區域,如果能在轉彎時通過鉸軸連接的車架與后橋鎖定,這時叉車就成為四點支撐,形成穩定四邊形區域(見圖3)。這時,重心縱向距離不變,側向距離增大,即B1=B2,A1
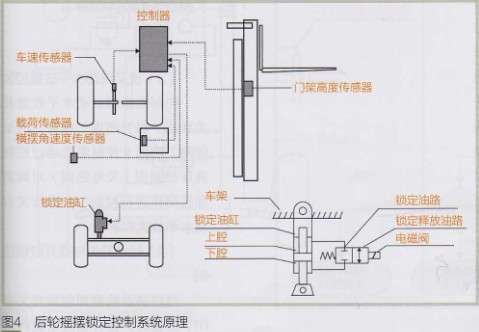
如圖4所示,后輪搖擺鎖定控制系統由鎖定油缸、電磁閥、載荷傳感器、橫擺角速度傳感器、車速傳感器、門架高度傳感器、控制器等構成。鎖定油缸的鎖定與釋放由電磁閥接受控制器指令進行控制,電磁閥為二位二通電磁閥,電磁閥在鎖定釋放位置,鎖定油缸上下腔連通,車架可自由擺動,叉車處于正常三支點狀態;電磁閥在鎖定位置,鎖定油缸上下腔關斷,車架與后橋剛性連接,叉車成為四支點支撐,提高了穩定性。
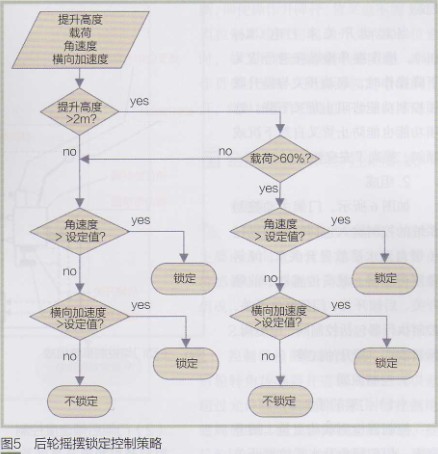
鎖定油缸在以下兩種情況下發生鎖定,一是車輛急轉彎時,離心加速度超過控制器設定值時鎖定;二是車輛急轉彎時,角速度超過控制器設定值時鎖定。在這兩種情況下,控制器通過車速傳感器檢測車速,橫擺角速度傳感器檢測角加速度,計算離心加速度,實施控制。具體控制策略如圖5所示。

價格:面談
價格:面談
價格:面談

價格:面談
新時代鞋服物流與供應鏈面臨的變革和挑戰03月07日 20:38

點贊:這個雙11,物流大佬一起做了這件事11月22日 21:43

物流管理機構及政策分布概覽12月04日 14:10

盤點:2017中國零售業十大事件12月12日 13:57

2017年中國零售電商十大熱點事件點評12月28日 09:58
